RT 060 Training System Position Control, HSI Дидактическое оборудование Оборудование для профессиональной подготовки Тренажер Process Control
Основы техники управления на примере системы управления положением с интегральным поведением
Особенности
- основные взаимосвязи техники управления на примере системы управления положением
- настраиваемый и параметризуемый программный контроллер с обширными функциями
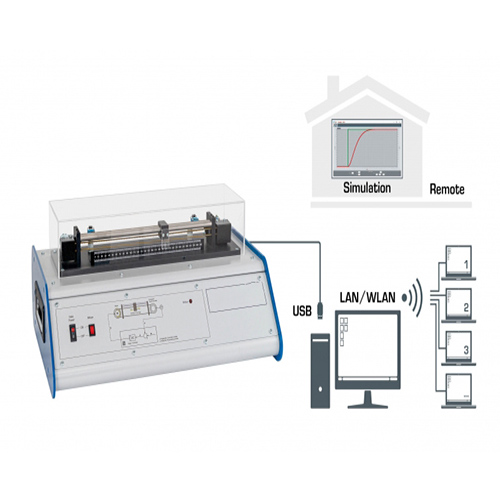
- подготовка эксперимента и программное моделирование для дистанционного обучения
- эксперименты можно отслеживать и анализировать в локальной сети
Цели обучения/эксперименты
- основы техники управления на примере системы управления положением
- отклик разомкнутого контура управления
- управляемая система без обратной связи
- влияние различных параметров и методов контроллера на отклик замкнутой системы
- оптимизация контроллера путем изменения параметров контроллера: Kp, Tn, Tv
- запись переходных характеристик: управление переменным шагом и шагом опорного значения
- управление ограничением переменной и воздействием на систему управления
- программное моделирование различных управляемых систем (P, I, PT1, PT2)
- сравнение различных параметров управляемой системы
- специальное программное обеспечение для всего устройства серия
- контроллер: ручное, неконтролируемое ручное управление, непрерывный контроллер, двух- или трехточечный контроллер
- программатор для собственных прогрессий опорных значений
- запись временных зависимостей
- удаленное обучение: программное моделирование на любом количестве рабочих станций
Спецификация
[1] управление положением: типичная управляемая система
[2] управляемая система: подвижный слайд с линейной дорожкой
[3] управляемая переменная: положение подвижного слайда
[4] измерительный элемент: поворотный энкодер (многооборотный потенциометр) в качестве датчика положения
[5] программный контроллер можно настроить и параметризовать как P, PI, PID и контроллер переключения
[6] привод: двигатель


[7] стальная шкала для наблюдения за положением
[8] прозрачная защитная крышка над экспериментальной установкой
[9] 2 микропереключателя для отключения в конечном положении
[10] программное моделирование: различные управляемые системы
[11] программное обеспечение: возможность подключения любого количества внешних рабочих станций в локальной сети для отслеживания и анализа эксперимента
[12] подготовка эксперимента и программное моделирование на любом количестве рабочих станций для удаленного обучение
[13] программное обеспечение с функциями управления и сбора данных через USB под Windows 10
[14] мультимедийные учебные материалы онлайн в Media Center
Технические данные
Двигатель
- рабочее напряжение: 12 В постоянного тока
- передаточное отношение: i=50
- скорость: 85 мин-1
- крутящий момент: 200 Нмм
Вращающийся энкодер: многооборотный потенциометр
макс. скорость перемещения: 45 мм/с
Стальная шкала: 0...300 мм
Программный контроллер можно настроить и параметризовать как P, PI, PID и контроллер переключения
Диапазоны измерения
- перемещение: макс. 300 мм
230 В, 50 Гц, 1 фаза
230 В, 60 Гц, 1 фаза
120 В, 60 Гц, 1 фаза
UL/CSA опционально
ДxШxВ: 600x450x280 мм
Вес: прибл. 20 кг