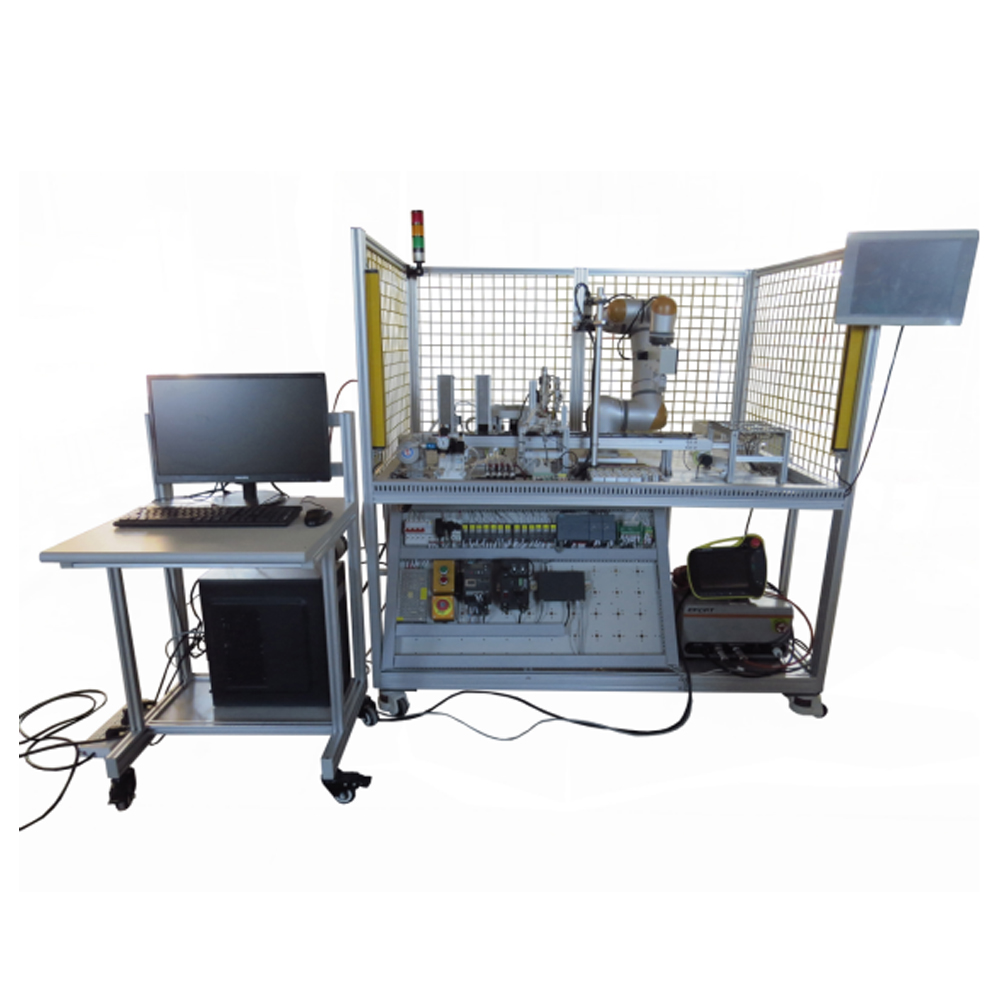
Совместная 6-осевая рука робота с камерой и захватом Оборудование для профессионального обучения Оборудование для обучения мехатронике
Предмет №: AFM012R
Совместная 6-осевая рука робота с камерой и захватом Оборудование для профессионального обучения Оборудование для обучения мехатронике